
服务热线:1362169548613621695486
服务热线:1362169548613621695486
1 前言
近年来,低下的移动出行效率以及频发的交通事 故已成为当前交通事业发展面临的最艰巨的挑战,高 度复杂的道路交通场景对智能驾驶汽车的安全性提 出了更高的要求,使车辆驾驶人员从驾驶和拥堵中解 放出来成为汽车行业需要面临和解决的一个关键问 题。在工业4.0和第4次工业革命的大背景下,汽车经 过不断发展,逐步进入电动化和智能化时代,汽车技 术呈现出了成熟的主动安全系统,辅助或代替了驾驶 员的一部分工作。尤其随着人工智能(AI)技术及相 关算法的不断成熟,智能驾驶乃至无人驾驶逐步成为 可能,伴随着对汽车安全及运行效率要求的不断提 高,许多传统的整车企业纷纷制定智能化发展路线和 战略,相关技术及产业领域的市场前景巨大 。车辆 智能驾驶功能即以车载传感器信号为基础,进行感 知、决策、执行控制等过程,实现车辆对于周围环境的 判断和辅助功能,可以说智能驾驶汽车及
2 智能网联车辆测试分析
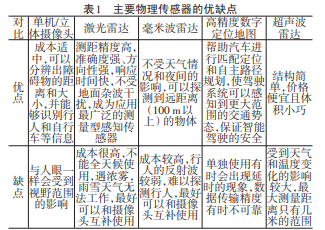
当前,智能驾驶等级标准划分仍然遵循国际通用 标准,依据不同车辆和驾驶员在车辆控制方面的作用 和职责,在决策控制方面可以区分为“辅助控制类”和 “自动控制类”,分别对应不同等级的决策控制 。其 中,辅助控制类主要指车辆利用各类电子技术辅助驾 驶员进行车辆控制,如横向控制、纵向控制及其组合 模式,可分为驾驶辅助(DA,L1 级)和部分智能驾驶 (PA,L2级);自动控制类则根据车辆自主控制以及替 代人员进行驾驶的场景和条件进一步细分为有条件 智能驾驶(CA,L3级)、高度智能驾驶(HA,L4级)和完 全智能驾驶(即无人驾驶FA,L5级) 。 智能汽车ADAS系统需求旺盛,作为其关键技术 的感知传感器,其功能、性能及成本会直接影响ADAS 发展。自车感知性能指的就是通过各类传感器获取 周围环境信息的能力,当前ADAS测试系统常用的物 理传感器包括超声波雷达、激光雷达、毫米波雷达、单 机/立体摄像头、高精度数字定位地图等。上述各种传 感器的优缺点如下方的表1所示。 车载摄像头与消费电子摄像头结构类似,是将镜 头组、CMOS 芯片封装为模组,并和数字信号处理器 (Digital Signal Processor,DSP)集成,其应用场景较多, 可以实现先进行车辅助(行车记录仪、ADAS)、驻车辅 助(全车环视)与车内人员监控(人脸识别技术)等功 能。单目摄像头一般安装在前挡风玻璃上部,用于探 测前方路况,识别周边车辆、行人等信息,广泛应用于 前碰撞预警、行人监测、车道偏离预警等功能中,由于其成本低廉,技术成熟,目前被广泛搭载于智能车辆 上,仍然是当前和未来市场的应用主流。
毫米波雷达原理是向周围发射无线电,通过测定 和分析反射波以计算障碍物的距离和方向。无线电 的波长范围在 1~10 mm,频率范围在 30~300 GHz, 当下主流的车载毫米波雷达有 24 GHz 和 77 GHz 两 个频段,24 GHz 多用于短/中距离测量,77 GHz 用于 中/长距离测量,由于 77 GHz 毫米波雷达性能优于 24 GHz,故未来前者将是主流的应用频段。
3 智能网联车辆技术架构与路线分析
智能网联车辆的测 试主要包括安全性测试和一般专项性能测试两方面, 昆山舒美认为,安全性测试包括针对功能安全性和信息安全性 的测试,且二者均需要进行硬件在环测试,即对智能 网联汽车系统及零部件的测试,可以说,功能安全和信息安全是智能网联汽车安全问题的核心技术难点, 直接影响着智能网联汽车的未来市场前景和发展。 智能网联车辆可以自主操纵油门和制动、方向(转向) 及挡位等信息,并且可以实时监测车辆行驶的数据状 态,操作方便也更加精确,汽车智能化技术的进步必 然会让交通事故死亡率得到显著下降。智能驾驶汽 车具有自身的特点,主要表现为其对环境更为敏感, 对周围物理状态的把握相比较驾驶人员更准确,但是 智能网联汽车车辆还缺乏像人类驾驶员一样的灵活 应变能力 。



